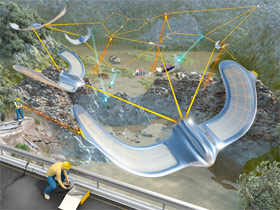
The US Army MAST center is designing a swarm of Micro Air Vehcles (SMAVs) capable of autonomously establishing emergency wireless networks (SMAVNETs) between multiple ground-users in a disaster area. The SMAVNET is required to be rapidly deployable in any environment following the paradigms of swarm robotics. MAVs are designed to be minimal (low-cost, light-weight, simple electronics) and do not use position sensors (cameras, GPS), which are dependent on the environment, expensive in terms of energy, cost, size and weight or unusable at large ranges. Rather than that, agents rely on local communication with immediate neighbors and proprioceptive sensors which provide heading, speed, altitude and angular velocities.
The projects goal is to replace damaged, inexistent or congested networks and can play an important role in disaster mitigation. The aerial nature of the system is interesting in that it allows for line-of-sight transmissions between MAVs, which is more energy-efficient than communication in cluttered environments at ground level. Furthermore, MAVs can fly over difficult terrain such as flooded areas or debris.
In the scope of the SMAVNET project the Army is developing a generic MAV platform usable in most aerial robotic applications. The construction of 10 to 20 of these MAVs will serve as a demonstration platform for developed SMAVNET swarm algorithms.
